심층 이해형 AI 기반 로봇 자율지능 시스템 ‘ARC Core’
ARC Core는 서비스로봇의 밀집 환경 및 상황 인식 능력 부족 문제를
해결하기 위해 개발된, 로봇의 두뇌 역할을 하는 자율지능 시스템입니다.
진정한 인공지능 로봇 개발을 위한
필수적 요소

보고 · 듣고 · 느끼는
감성 인식 등
센싱 기반 기술 / 로봇
감성 인식 등
센싱 기반 기술 / 로봇
- 제한적인
서비스 - 파편화된
정보 - 단편적인
인식

범용적인 배경지식을 바탕으로
인식하고 조작하는
‘심층 이해’가 수반되는 기술 / 로봇
인식하고 조작하는
‘심층 이해’가 수반되는 기술 / 로봇
- 범용적
배경 지식 - 심층적
상황 이해/추론 - 실시간
작업 관리

미세한 조작 · 고중량 조작 · 감성 표현 등
다양한 조작 행위에 대한
고성능 기술 / 로봇
다양한 조작 행위에 대한
고성능 기술 / 로봇
- 반사적인
행위 - 목적성
부재 - 순차적인
행동
ARC Core를 사용한 로봇 서비스 구현 방식의 핵심은
범용적인 배경 지식을 기반으로 AI가 스스로 로봇의 최적 행위를 도출해내는 것입니다.
아리카 자율지능 인지, 추론, 행위, 학습
메커니즘 CYCLE
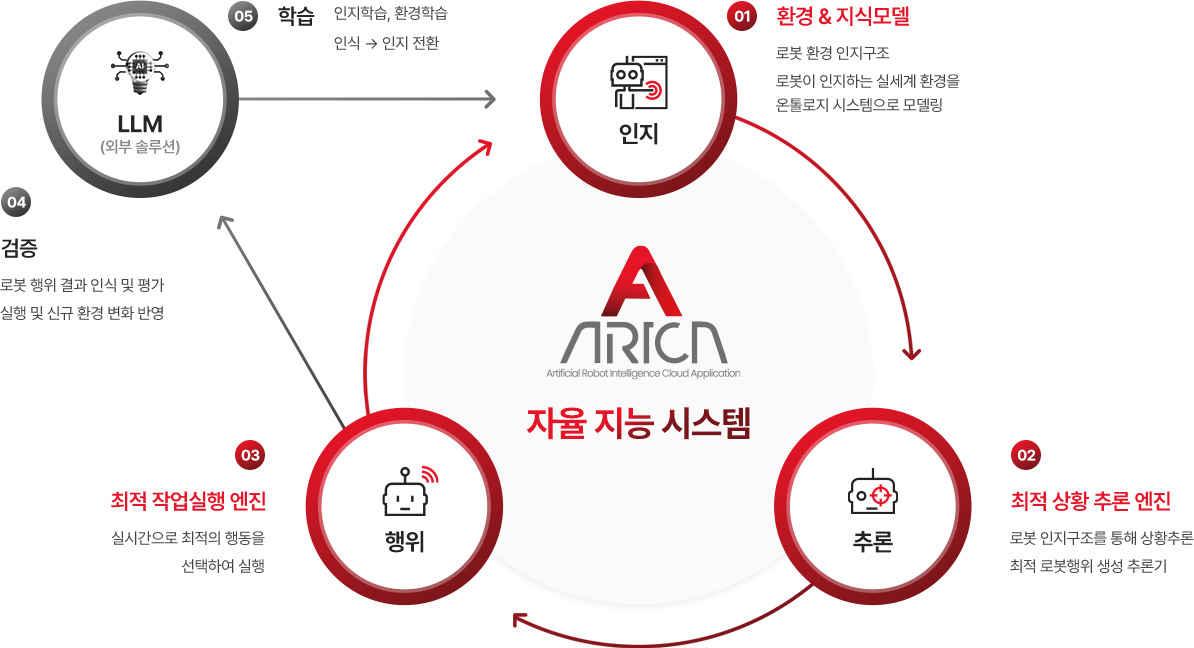
ARC Core는 로봇의 실시간 센서 정보를 배경 지식(온톨로지)을 통해 가공합니다.
이를 바탕으로 복잡하고 심층적인 상황을 이해하고, 최적의 행동을 추론하는 기술을 제공합니다.

보유 기술 1
공통 배경 지식
데이터 온톨로지
- 로봇 환경 인지 구조
- 시간/공간/객체 등 일반적인 환경에 대한 공통 지식
- 100만 건 이상의 행동 패턴 수행 가능
- 서비스 도메인 별 확장 가능

보유 기술 2
규칙 기반 상황 추론 기술
- 최적 로봇 행위 생성 추론기
- 지식과 규칙을 활용해 단순한 데이터를
복잡하고 심층적인 상황으로 이해 - 작업을 수행하기 위한 계획을 수립하여
로봇 행동에 반영

보유 기술 3
최적 작업 실행 엔진
- 실시간으로 최적의 행동을 선택하여 실행
- 행위 목표를 달성하기 위해 로봇 하드웨어의
보유 능력에 맞는 액션 수행 방식 선택 - 행위 중 실시간으로 변화하는 환경 데이터를
수집 및 분석하여 재학습